6月6日,物理科学与技术学院郭伟团队在美国物理学会(APS)旗下的期刊 Physical Review Research上,以“Collective Behavior Based on Topological Vision”为题,发表了活性粒子集体运动方面的最新研究成果。论文链接:https://doi.org/10.1103/PhysRevResearch.7.023234
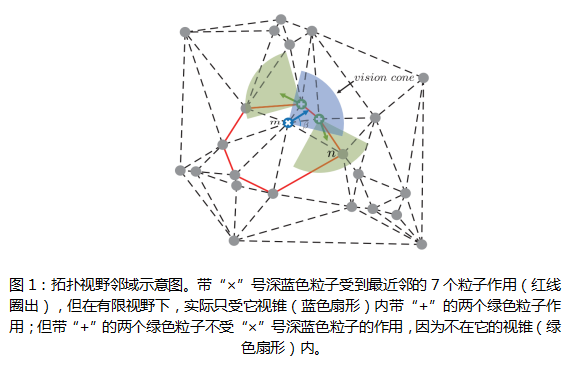
活性粒子的集体行为,是非平衡统计物理与复杂系统研究的前沿课题。它在理解自然群体运动(如微观的细菌,宏观的鱼类、鸟群集群)和设计人工自驱动器件(如机器人)方面,具有重要意义。传统理论模型基于“度量邻域”假设,而实际生物系统更符合“拓扑邻域”交互机制(如Voronoi结构),且往往存在有限的视野感知范围,造成相互作用的非互易性(图1)。在拓扑邻域框架下,引入视觉限制来描述活性粒子的集体动力学是亟待解决的科学问题。
论文提出“拓扑视野”概念,构建了“有限视角-拓扑”的耦合模型(图1)。此外,该模型区别于传统意义上的“速度对齐”机制,采用基于“位置”信息的相互作用机制。
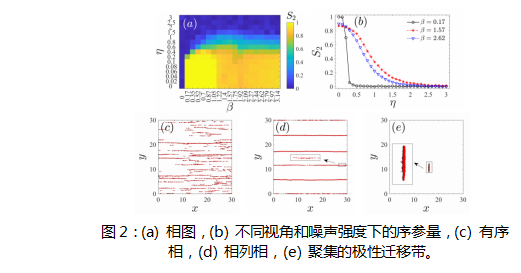
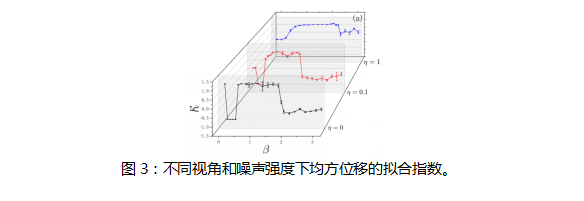
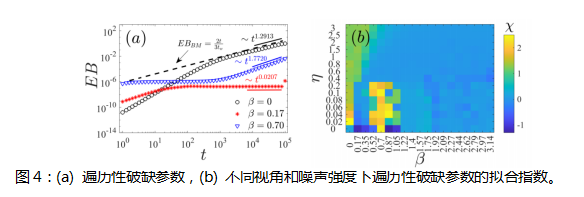
研究发现,受到视野限制与拓扑相互作用的粒子,能够形成3类典型相:有序相、相列相以及聚集的极性迁移带(图2)。研究还揭示了不同视角与随机涨落下的扩散行为,即从次扩散到超扩散再回到次扩散的非单调变化(图3)。更为重要的是,发现弱非互易拓扑相互作用导致遍历性,而强非互易拓扑相互作用导致非遍历性(即系统存在非遍历性的超扩散,图3、4)。
该成果在理论上为研究“拓扑近邻+有限视觉感知”的集群运动铺平了道路。模型显示在没有速度对齐机制的条件下,仅通过位置感知就能形成复杂的有序结构,根植于“反常扩散与遍历性破缺”,展现出一定的适应性与鲁棒性,为视觉感知的机器人集群、无人机编队等提供理论支撑。尤其在研究分布式控制、自组织网络和大规模自适应自驱动系统中,有良好的应用潜力。
课题组博士研究生施宏达为论文第一作者,郭伟副教授为通讯作者,昆明学院为第一单位。论文合作者云南大学杜鲁春副教授做出了重要贡献。感谢昆明学院黄飞杰副教授,南京大学金国钧教授、张海军教授的有益讨论。本研究受到国家自然科学基金(12165010)、云南省基础研究项目(202501AT070070、202401AT070422)、兴滇人才支持计划、春城青年拔尖人才计划、南京大学国家固体微结构实验室开放课题(M33020)和昆明学院科研特色团队(2023)的联合资助,特此致谢!

